WDIC
Franz Lauritsch, Günther Jena
Zwei Themengebiete
- Embedded Systems
- Robotik
Embedded Systems
Embedded Systems sind spezialisierte Computersysteme, bestehend aus Hardware und Software, die in Geräten oder Anlagen integriert sind, um spezifische, aufgabenorientierte Funktionen effizient und zuverlässig auszuführen.
Robotik
Robotik ist ein interdisziplinäres Fachgebiet, das sich mit Konstruktion, Entwicklung, Steuerung und Anwendung von Robotern befasst, welche mechanische, elektronische und programmierbare Elemente kombinieren, um autonome Aktionen auszuführen und Aufgaben in einer Vielzahl von Anwendungen zu erledigen.
Beispiele

Beispiele
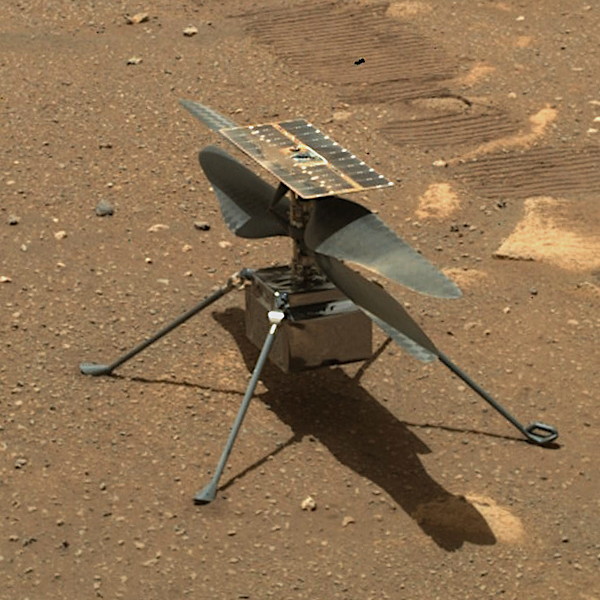
Beispiele

Beispiele

Inhalt 4. Klasse
- Vertiefung im Bereich der Digital- und Steuerungstechnik anhand von Robotern
- Jeder baut sich seinen eigenen Roboter
- Hardware: Megacard, Roboter, ESP32, Raspberry Pi
1. Roboter

- Bausatz
- ATMEGA16
- Fertige Libraryfunktionen
- Billige, anfällige Mechanik
- Kosten: ca. 50€
2. Roboter
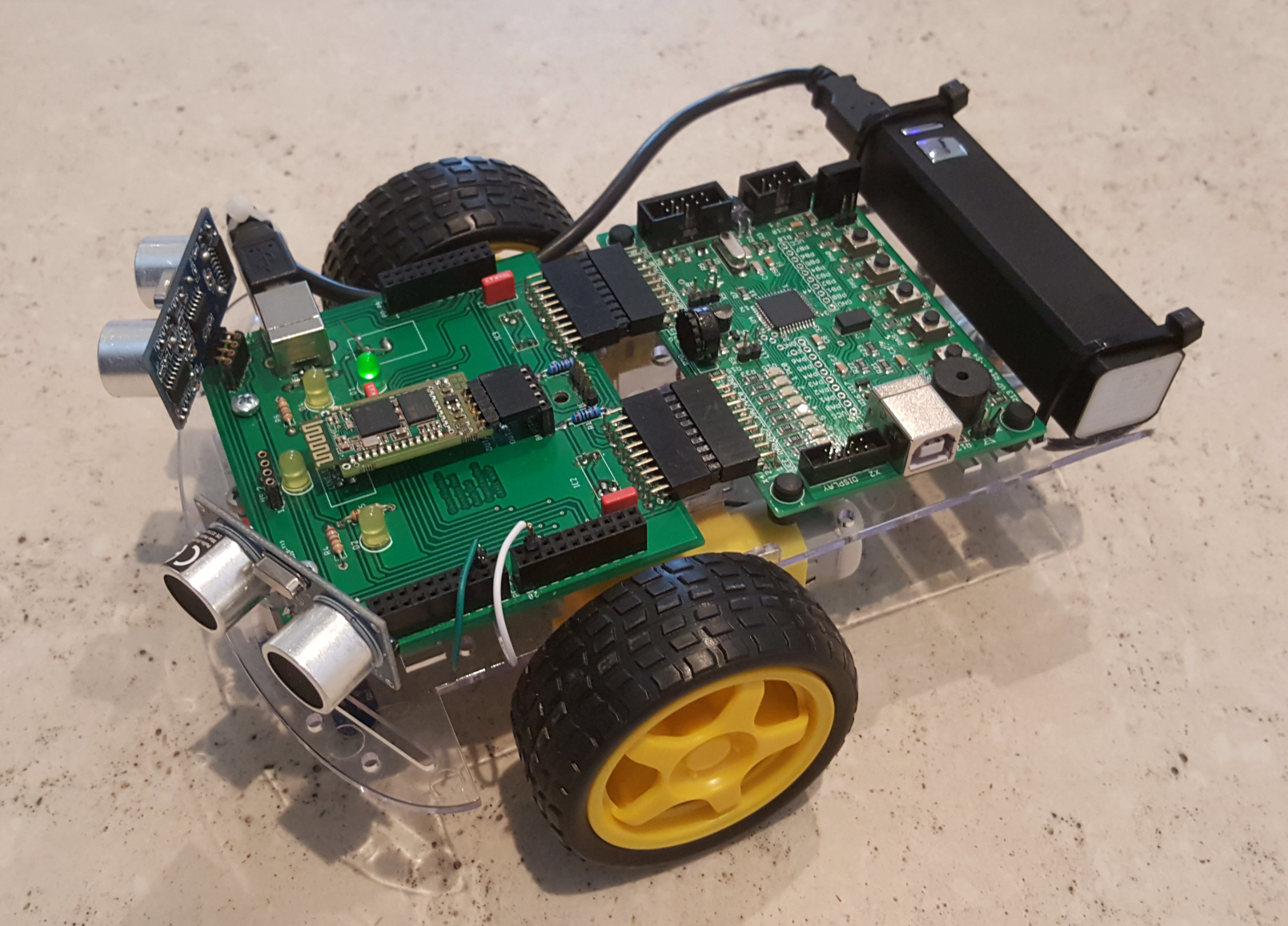
- Mechanik: Bausatz
- Elektronik
- Megacard
- Treiberplatine
- HWE Projekt 4HEL
- Treiberprogrammierung
- Kosten: ca. 35€
3. Roboter
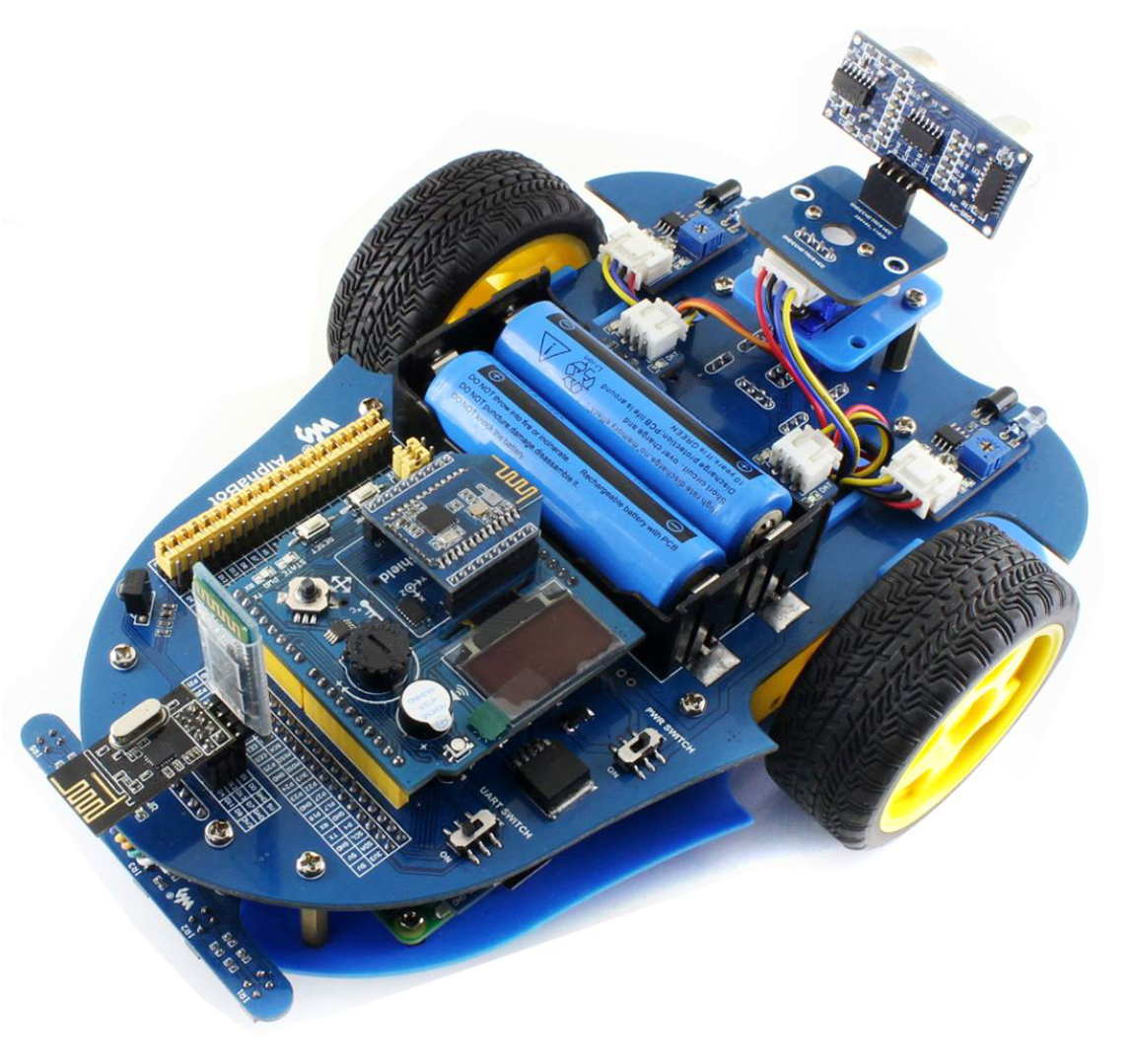
- Bestückter Bausatz
- Arduino und RPI kompatibel
- Eigene uC-Adapter
- Viele Sensoren
- Erweiterbar
- Kosten: ca. 70€
Adapterplatinen
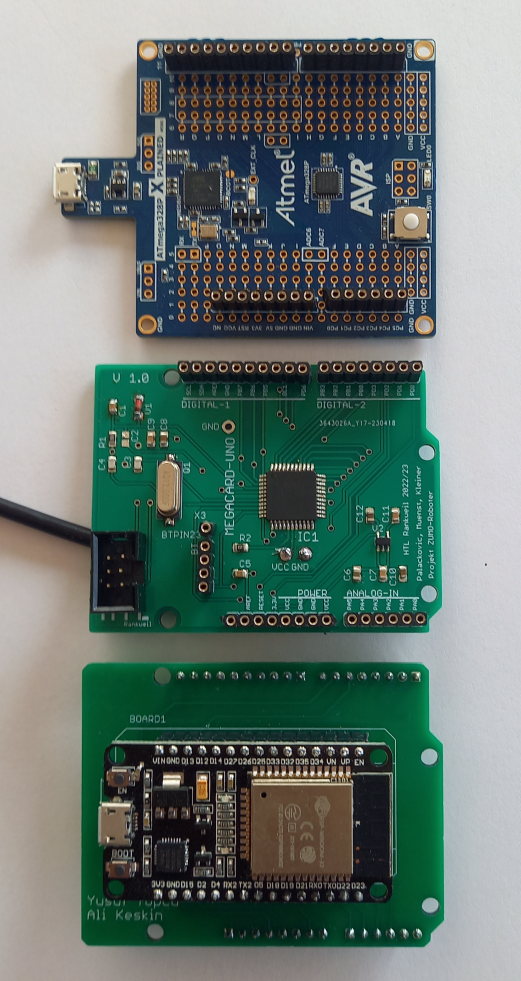
- Atmel xplained
- Atmega16 mit BT-Download
- ESP32
Inhalt 4. Klasse
- Einführung in mobile Roboter
- Modularisierung
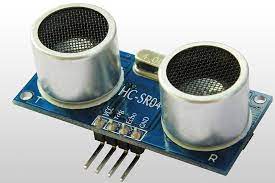
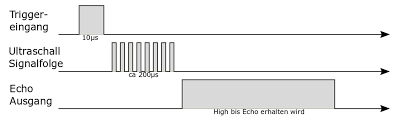
- Zeitmessung/-steuerung mit dem TimerCounter1
- Bsp.: Abstandssensor HC-SR04
Inhalt 4. Klasse
- Sensoren
- Abstand
- Odometrie
- Position
- Navigation
- Aktoren
- Motoren
- Servo
- Schrittmotor
Inhalt 4. Klasse
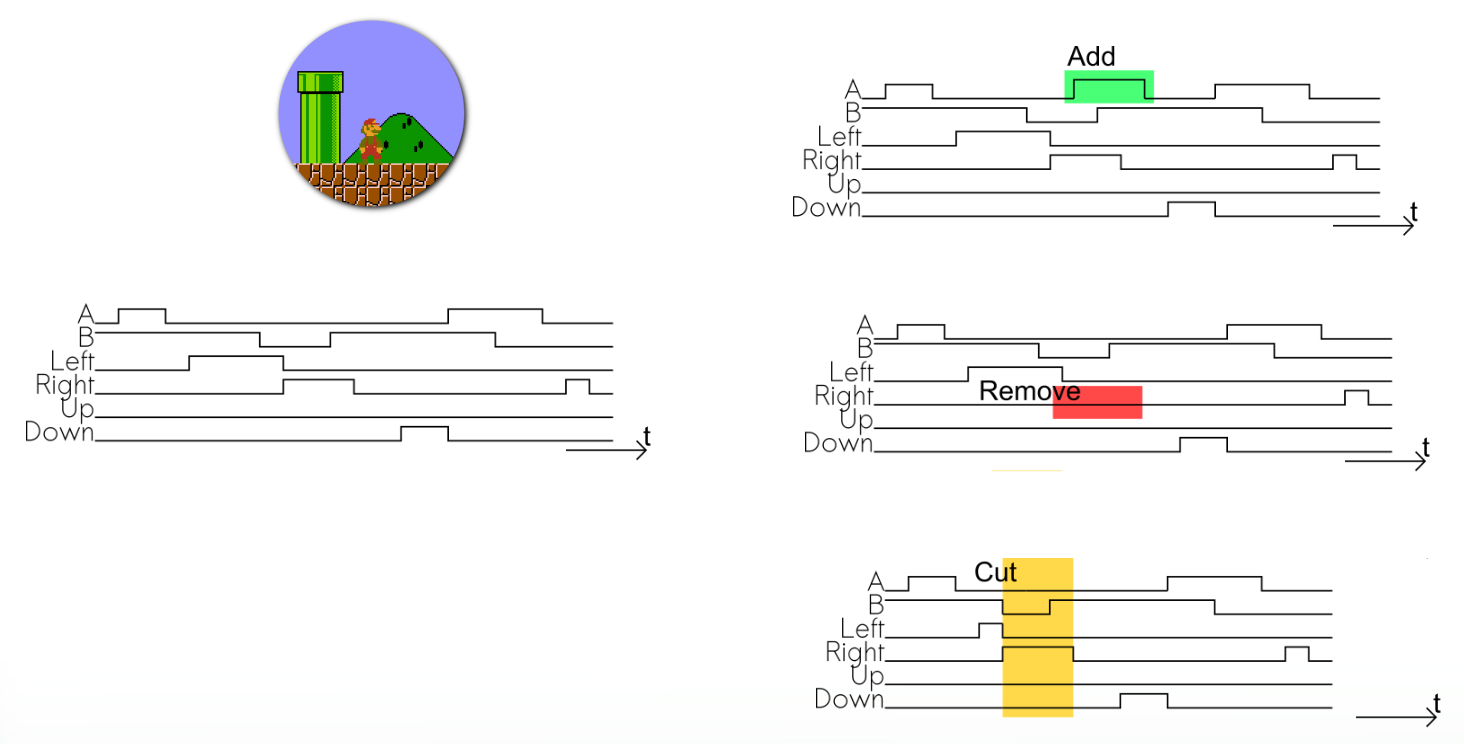
- Algorithmen zur Steuerung von Robotern:
- Chaosfahren, Geradefahren, Linienfolger, Wandfolger (Labyrinth)
- Kommunikation: Roboter <–> PC/Handy
- BT, GSM, WIFI
- PC: C#-Programmierung
- Einfache Protokolle
- ESP32-Einführung mit eigenen kleinen Projekten
Inhalt 5. Klasse
- Python (Fokus auf Embedded Systems)
- Algorithmen zur Suche
- Internet of Things (MQTT, ...)
- Projekte mit ESP32 und RaspberryPi
Python
- Zählt zu den beliebtesten Programmiersprachen
Quellen Github, TIOBE - Zählt zu den meist verwendeten Programmiersprachen
Quellen Stackoverflow, Microsoft
Algorithmen
- Inverse Kinematik
- Graphentheorie
- Suche
- Spieltheorie
- Evolutinäre Algorithmen
- Neuronale Netze
Iteration 1
Iteration 4
Iteration 11
Internet of Things
- MQTT Protokoll
- ESP32 & Raspberry Pi
- Safety & Security