Übungsaufgabe 

- Entwurf einer universellen Zählerkomponente
- Erkennung eines Tastendrucks
- Implementierung einer Zustandsmaschine
- Aufbau eines Top Levels
Die Stoppuhr entspricht in ihrer Bedienung einer klassischen digitalen Stoppuhr. Zwei Tasten reichen für die Bedienung aus:
- Start/Stop - die Zeitnehmung wird gestartet bzw. gestopped
- Reset/Lap - die Zeitnehmung wird zurückgesetzt bzw. die Zwischenzeit angezeigt
Die vier 7-Segment Anzeigen werden für die Ausgabe der Zeit verwendet (hier 0 Minuten, 13 Sekunden und 5 Zehntelsekunden):
Vorbereitung
- Projektordner herunterladen und entpacken
- Projekt
stopwatch.xiseöffnen
Entwicklung einer universellen Zählerkomponente
Spezifikation
Der Zähler soll folgende Spezifikation erfüllen (immer synchron zur steigenden Taktflanke von clk):
- Wenn
enable_iauf0ist soll der Zähler nicht zählen - Wenn
enable_iauf1ist soll der Zähler sich um eins erhöhen - Wenn der Zählerstand
MAXIMUMerreicht soll der Zähler (im nächsten Schritt) auf 0 gesetzt werden - Solange
reset_iauf1ist, soll der Zählerstand auf 0 gesetzt werden - Ein gesetztes
reset_ihat eine höhere Priorität als ein gesetztesenable_i value_oentspricht dem internen Zählerstandoverflow_oist1, wenn der interne Zählerstand beiMAXIMUMsteht undenable_iauf1ist (kombinatorisch verknüpft)
Implementierung
- Öffne
counter.vhd - Erweitere das Design entsprechend der folgenden Spezifikation (an den mit
TODOmarkierte Stellen)
Test mittels Testbench
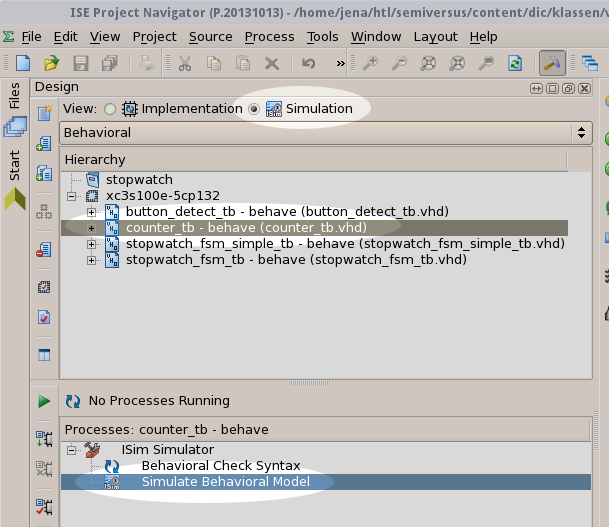
- Wechsle im Design Tab bei View nach Simulation
- Wähle die Testbench
counter_tb(Dateicounter_tb.vhd) - Starte die Simulation mittels Simulate Behavioral Model
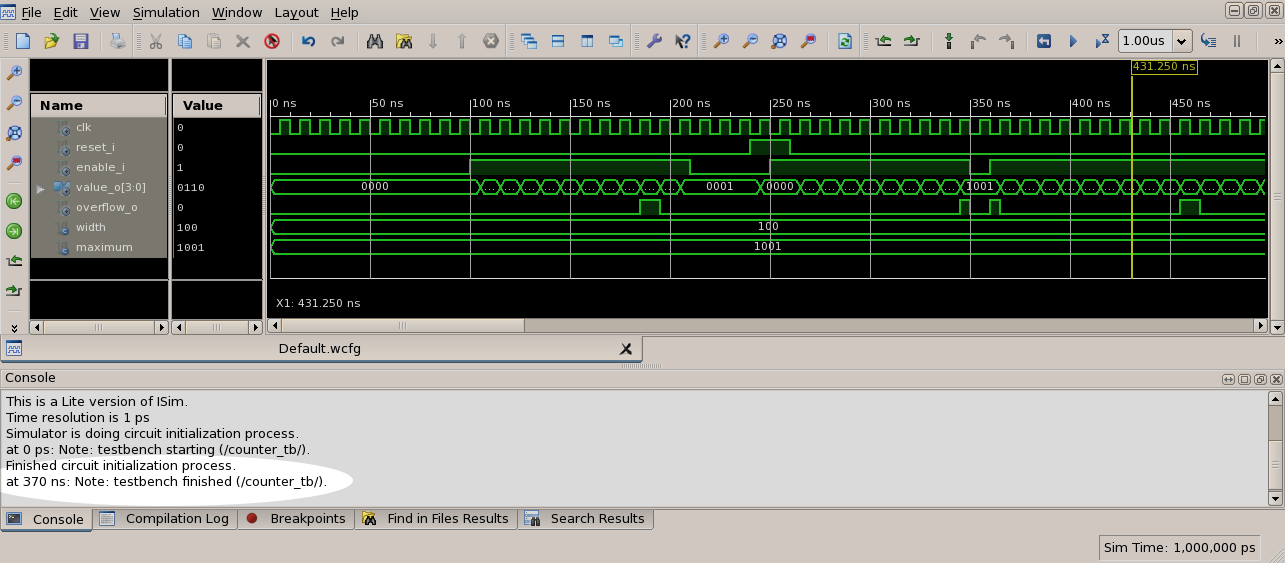
Beim Durchlaufen der Testbench werden etwaige Fehler des Design angezeigt. Eine erfolgreiche Testbench endet ohne Fehlerausgaben:
Tastendruck Erkennung
Spezifikation
Tasteneingänge sind asynchron zum globalen Takt, deswegen müssen sie einsynchronisiert werden. Nachdem der Eingang synchronisiert ist benötigt man im Allgemeinen eine synchrone Flankenerkennung, d.h. bei einer steigenden Flanke soll der Ausgang detect_o für einen Taktzyklus lang auf 1 sein. Eine fallende Flanke soll ignoriert werden.
Timingdiagramm

Implementierung
Bearbeite dazu die Datei button_detect.vhd. Die beiden Register button_reg1 und button_reg2 dienen der Einsynchronisierung des asynchronen Signals von button_i.
Test mittels Testbench
- Wechsle im Design Tab bei View nach Simulation
- Wähle die Testbench
button_detec_tb(Dateibutton_detect_tb.vhd) - Starte die Simulation mittels Simulate Behavioral Model
Beim Durchlaufen der Testbench werden etwaige Fehler des Design angezeigt. Eine erfolgreiche Testbench endet ohne Fehlerausgaben (siehe Test des universellen Zählers).
Zustandsmaschine für die Stoppuhr
Spezifikation
Die Zustandsmaschine für die Stoppuhr soll im ersten Schritt drei Zustände umfassen:
CLEARED- Zeit läuft nicht
- Stoppuhr steht auf "0:00:0"
- Mittels Start/Stopp soll die Zeitnehmung starten
- Reset/Lap hat keine Auswirkung
RUNNING- Zeit läuft
- Zeigt die aktuelle Zeit an
- Mittels Start/Stopp soll die Zeitnehmung gestoppt werden
- Reset/Lap hat keine Auswirkung
STOPPED- Stoppuhr läuft nicht
- Zeigt die (gestoppte) Zeit an
- Mittels Start/Stopp soll die Zeitnehmung fortgesetzt werden
- Mittels Reset/Lap soll die Zeit auf "0:00:0" zurückgesetzt werden
Die Zustandmaschine hat zwei Eingaben (Taster Start/Stopp und Reset/Lap). Die Ausgabe clear_o setzt die Zähler zurück. Solange enable_o auf '1' ist laufen die Zähler.
Zustandsdiagramm
Zeichne das Zustandsdiagramm. Wähle einen passenden Zustandsmaschinentyp aus (Mealy oder Moore).
Implementierung
Vervollständige die Vorlage von stopwatch_fsm. Dort sind die Zustände CLEARED, RUNNING und STOPPED als Typ definiert. Die Behandlung des Zustands CLEARED und die Ausgabe von clear_o ist als Beispiel bereits implementiert.
Der Ausgang mode_o wird erst später benötigt und soll vorerst nur '0' ausgeben.
architecture behave of stopwatch_fsm is type state_t is (CLEARED, RUNNING, STOPPED); signal state : state_t := CLEARED; begin fsm_process: process (clk) begin if rising_edge(clk) then case state is when CLEARED => if ss_i='1' then state <= RUNNING; end if; when RUNNING => -- TODO when others => -- includes STOPPED -- TODO end case; end if; end process; clear_o <= '1' when state=CLEARED else '0'; enable_o <= '0'; -- <<< TODO mode_o <= '0'; end architecture;
Test mittels Testbench
Teste die Zustandmaschine mittels der Testbench stopwatch_fsm_simple_tb (Achte auf das simple im Name!).
Integration aller Komponenten im Top Level
Mit den erstellten Komponenten wird nun ein Stoppuhr-Design aufgebaut. Dazu erweitern wird das Top Level Design in stopwatch.vhd.
Tastendruckerkennung
Die Komponente button_dect wird verwendet, um das Signal button_ss_i und button_rl_i einzusynchronisieren und auf eine steigende Flanke zu überprüfen. Dazu wird folgende Komponente in der architecture von stopwatch.vhd hinzugefügt:
button_ss_detect_component: entity work.button_detect port map ( clk => clk, button_i => button_ss_i, detect_o => button_ss_detect );
Analoges Vorgehen für die Taste button_rl_i.
Zustandsmaschine
Die Zustandmaschine wird nun auch entsprechend eingebunden.
- Erstelle eine Instanz von
stopwatch_fsmmit dem Namenstopwatch_fsm_component - Verbinde den Eingang
clkmit dem Signalclk - Verbinde den Eingang
ss_imit dem Signalbutton_ss_detect - Verbinde den Eingang
rl_imit dem Signalbutton_rl_detect - Verbinde den Ausgang
mode_omit nichts (open) - Verbinde den Ausgang
clear_omit dem Signalclear - Verbinde den Ausgang
enable_omit dem Signalenable
Vorteiler
Um Zehntelsekunden zu erzeugen wird ein Vorteiler mit dem Faktor 5 Millionen verwendet.
prescale_component: entity work.counter generic map ( WIDTH => 23, MAXIMUM => 5000000 ) port map ( clk => clk, reset_i => clear, enable_i => enable, value_o => open, overflow_o => tenth_second_enable );
- Diese
counterwird über dasgeneric mapals Zähler mit 23 Bit und Maximum bei 5 Millionen definiert - Der Ausgang
value_owird nicht verwendet (wird durchopensignalisiert) overflow_osteuert das Signaltenth_second_enablean (ist nun alle 5 Millionen Takte für einen Takt high)enable_iwird durchenableangesteuert (Ausgang der Zustandsmaschine)reset_iwird durchclearangesteuert (Ausgang der Zustandsmaschine)
Zehntelsekunde
- Erstelle eine weitere Instanz eines Zählers(
tenth_second_component) analog zuprescale_component WIDTHundMAXIMUMmüssen nicht extra definiert werden (generic mapkann wegfallen), da diese Werte der Standardeinstellung entsprechenenable_iwird durchtenth_second_enableangesteuertreset_iwird durchclearangesteuertvalue_osteuertdigit0anoverflow_osteuertsecond_enablean
Sekunde
- Erstelle eine weitere Instanz eines Zählers(
second_component) analog zutenth_second_component enable_iwird durchsecond_enableangesteuertvalue_osteuertdigit1anoverflow_osteuertten_second_enablean
Zehner Sekunde
- Erstelle eine weitere Instanz eines Zählers(
ten_second_component) analog zutenth_second_component MAXIMUMwird auf 5 gestellt (Sekunden gehen bis 59) - dazu wird diegeneric mapgenutztenable_iwird durchten_second_enableangesteuertvalue_osteuertdigit2anoverflow_osteuertminute_enablean
Minute
- Erstelle eine weitere Instanz eines Zählers(
minute_component) analog zutenth_second_component enable_iwird durchminute_enableangesteuertvalue_osteuertdigit3anoverflow_owird nicht verwendet (mitopenverbunden)
display hinzufügen
display_component: entity work.display port map ( clk => clk, digit0_i => digit0, digit1_i => digit1, digit2_i => digit2, digit3_i => digit3, dots_i => "1010", segments_o => segments_o, an_o => an_o );
Test auf der Hardware
Wechsle in die Implementierungsansicht und synthetisiere das Top Level Desgin stopwatch. Teste die Funktionsweise auf dem Basys2 Board aus.
Erweiterung um Zwischenzeitnehmung
Spezifikation
Im letzen Schritt gibt es eine Erweiterung des bestehenden Designs: Die Zwischenzeitnehmung.
- Im Zustand
RUNNINGwird durch Drücken von Reset/Lap in den ZustandLAPgewechselt werden - In
LAPwird nicht die aktuelle Zeit angezeigt, sondern eine zwischengespeicherter Zeit - Im Zustand
LAPwird durch Drücken von Reset/Lap wieder zurück in den ZustandRUNNINGgewechselt werden - Im Zustand
LAPwird durch Drücken von Start/Stopp in den ZustandLAP_STOPPEDgewechselt werden - Im Zustand
LAP_STOPPEDläuft die Zeit nicht weiter, es wird weiterhin die zwischengespeicherte Zeit angezeigt - Im Zustand
LAP_STOPPEDwird durch Drücken von Reset/Lap in den Zustand STOPPED gewechselt
Implementierung
Die Eingänge digit0 bis digit3 der display_component werden nun nicht mehr über die Zähler angesteuert sondern mittels Register (digit0_reg, ... ist bereits definiert). Dieses Register soll die Eingänge digit0, ... übernehmen, wenn das Signal mode auf '1' ist (Ausgang der Zustandsmaschine). Füge dazu einen process im Top Level ein.
Erweitere die Zustandsmaschine um die zusätzlichen Zustände und steuere mode_o entsprechend der Spezifikation an.
Test mittels Testbench
Für die überarbeitete Zustandsmaschine steht eine Testbench bereit (stopwatch_fsm_tb).
Test auf der Hardware
Wechsle in die Implementierungsansicht und synthetisiere das Top Level Desgin stopwatch. Teste die Funktionsweise auf dem Basys2 Board aus.